
Risk-Based Inspection (RBI) is a methodology for assessing and prioritizing each piece of equipment in a process unit by its level of risk. It is an alternative to time-based inspections where all assets are evaluated equally based on regulatory time scales. However, in many industries, there is a small percentage of assets that require the majority of attention. Because of this, RBI helps operators to maximize investments of resources into the assets with a higher probability of failure.
Fundamentally, RBI is about using uncertainty and confidence to understand and manage risk. This is accomplished in part by using inspection effectiveness tables, damage mechanism review, and NDE method selection to achieve the highest level of confidence possible. While conventional automated ultrasonic testing (AUT) is a widely accepted NDE method for high confidence levels, comparatively, robotic technologies offer greater access, coverage, and data and can shift the paradigm on RBI confidence.
Risk-Based Inspections and Inspection Effectiveness
The guidelines for developing, implementing, and managing Risk-Based Inspections are detailed in API RP 580 and API RP 581. In RBI, risk is defined by calculating the Probability of Failure and Consequences of Failure. The former is a calculation that determines the probability of the equipment failing at a given time and the latter ranks the severity of the consequences of that failure occurring, such as loss of containment, environmental remediation, and even loss of personnel. The metrics are determined through qualitative and quantitative data analyses.
The hallmark of an effective RBI program is consistency and repeatability. Most strategies aim to reduce risk by implementing inspection and management strategies that give a high confidence level. Confidence is determined by a myriad of factors, including the NDE method used, coverage, and inspector certification level. An inspection effectiveness table is a useful tool for establishing confidence levels and determining program effectiveness to mitigate risk factors associated with certain damage mechanisms and asset types. The sample table below classifies confidence levels by asset inspection coverage. RBI programs will have different tables for damage mechanism and/or asset type.
Sample Inspection Effectiveness Table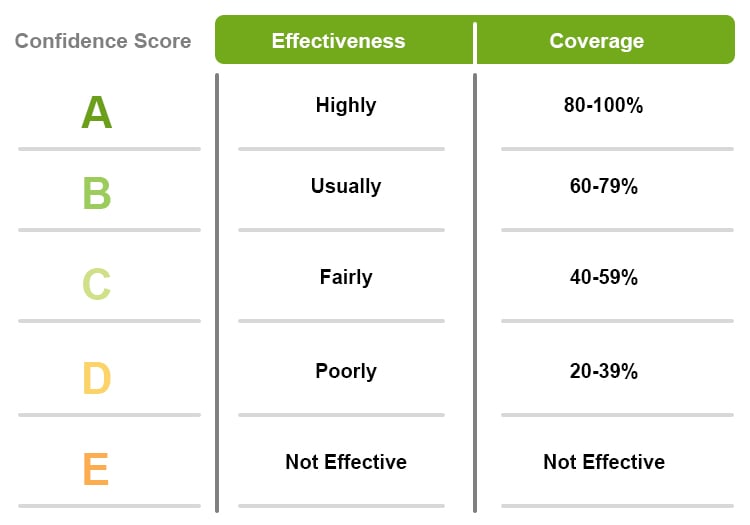 Adapted from Inspectioneering's Whiteboard Discussion: The Importance of API RP 581 Inspection Effectiveness Tables
Adapted from Inspectioneering's Whiteboard Discussion: The Importance of API RP 581 Inspection Effectiveness Tables
The critical first step in implementing an RBI program is to perform a damage mechanism review to better understand the current condition of assets and possible damage mechanisms.
Damage Mechanism Review
An essential building block of an effective mechanical integrity plan, damage mechanism reviews (DMRs) determine credible degradation modes and susceptibilities of equipment. DMRs are essential to developing an effective mechanical integrity plan and help to mitigate the risks associated with loss of primary containment or unplanned outages.
An effective DMR starts with data. The more process, operating, inspection, metallurgical, and equipment information available, the more accurate and clear the results will be. An interdisciplinary team of engineers, inspectors, and operations professionals will conduct the review, identify damage mechanisms, and draft a report of the findings. A DMR helps the operator to better understand the asset’s current condition, hone in on locations to inspect, and decide which technologies are best suited to inspect for the anticipated damage mechanism.
The results of the DMR will shed light on the asset’s condition and susceptibility to particular damage mechanisms. After the review is complete, the operator should assess the current NDE techniques and procedures in place to understand if they satisfy the level of inspection required to adequately maintain the asset.
Conventional AUT has been the dominant technology to generate A and B level RBI confidence scores. However, robotics offers many advantages over conventional methods.
Robotic Inspection Technologies
Developments in robotic-based UT inspection techniques, including Rapid Ultrasonic Gridding (RUG), Rapid AUT (R-AUT), Tri-Lateral Phased Array (TriLat), and Rapid Auto Weld (RAW) inspections, are opening the door to higher RBI confidence scores than otherwise possible due to advantages related to access, coverage, and data. Each approach is specialized in identifying particular damage mechanisms that commonly appear on DMRs:
- RUG: general corrosion in base metal
- R-AUT: generalized or localized corrosion in base metal
- TriLat: Wet H2S damage and environmental cracking in base metal
- RAW: environmental cracking, pitting, and other damage along weld lines and heat affected zones

The mobility and flexibility of robots mean they can access areas on assets that do not get regularly inspected. This includes but is not limited to internal inspections, confined space entry, and tank floors. Additionally, robots can scan entire assets without the need for scaffolding or rope access which is especially important for RBI programs running on a limited budget. The benefit of improved access includes an extensive inspection dataset to increase confidence scores.

Robots are extremely efficient tools to inspect entire assets at unprecedented speeds. RUG is the most efficient robotic technology, covering up to 5,000 ft2 (465 m2) per shift. For example, at this speed, an entire tank shell can be inspected in one to two shifts. The resulting corrosion map illustrates areas of localized or isolated corrosion that can be further inspected using R-AUT. This method can cover up to 1,000 ft2 (93 m2) per shift and uses a dual linear phased array probe to gather a tremendous amount of data. With similar coverage and efficiency to R-AUT, TriLat is a suitable inspection method for assets with known or expected wet H2S damage or environmental cracking. Lastly, robotic-enabled RAW can cover up to 2,500 linear feet (762 linear meters) of welds and HAZ per shift. When compared to robotics, conventional AUT methods are either much slower or only provide a statistical sampling of readings.
From an RBI perspective, the robot’s ability to scan nearly 100% of an asset produces higher confidence levels by coverage area, giving owner/operators a holistic view of asset conditions. Additionally, robots use encoders to determine their location on the asset. This is beneficial for two reasons; first, the inspection itself is repeatable given that the robot begins and ends scanning in the same locations. Second, repeatability of the inspection results in reproducibility of data that can be compared inspection over inspection to identify wear patterns or monitor the progression of damage over time.
Beyond access and coverage, another enormous benefit of robotic inspection methods to increase RBI confidence scores is data. RUG equipped robots can capture up to 250 UT readings per foot (2,691 UT readings per meter) at a data density as small as 0.25 x 0.25 inches (6 x 6 mm). That data is used to create 2D or 3D corrosion heat maps to visualize and quantify wall thinning across an asset.
One of the benefits of phased array robotic inspections is exceptional data density: R-AUT's mechanized phased array probes have a data density that is 25x greater than conventional AUT; TriLat's dual probe design generates 150,000 UT readings per ft2 (1.6M readings/m2); robots with PAUT generate over 94,000 UT readings per ft2 (over 1M readings per m2). This data is used to identify and quantify a wide range of damage mechanisms from corrosion to environmental cracking.
RBI confidence levels can also be based on the NDE method’s ability to accurately identify the damage mechanisms expected from a DMR. Because robots accurately, consistently, and efficiently produce an abundance of inspection data, owners/operators can avoid false calls and more confidently identify damage and make decisions on repairs and maintenance.
Robotic inspection methods are poised to shift the paradigm on RBI confidence levels by offering improved access, coverage, and data over conventional AUT. Depending on the results of the DMR, RUG, R-AUT, TriLat, and/or RAW can be deployed to identify and quantify the damage mechanisms expected and improve confidence scores, all while saving essential resources and protecting investments.
In a recent RBI Roundtable, Gecko Robotics’ Director of NDT Technology Operations, Chase David summarized the impact of robotics on RBI scores, “Robotics, I believe, are really opening the door to getting higher confidence scores than otherwise possible either through access or budgets.”
Want to learn more? Click here to watch the entire RBI Roundtable discussion.